Roboterpoléiermaschinn – Héichpräzis automatiséiert Uewerflächenveraarbechtung





Detailéiert Diagramm
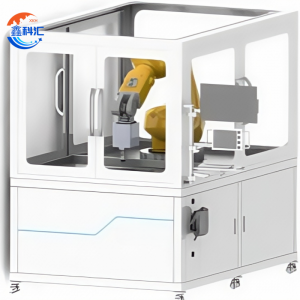

Iwwersiicht vun der roboterpoliermaschinn
D'Roboterpoléiermaschinn ass en fortgeschratt, vollautomatiséiert Uewerflächenveraarbechtungssystem, dat entwéckelt gouf fir déi héchst Ufuerderungen an der Präzisiounsfabrikatioun ze erfëllen. Si kombinéiert eng sechsachseg Robotersteierung, Force-Feedback-Poléiertechnologie an eng Duebelkappkonfiguratioun fir eng breet Palette vu Materialien a komplex Geometrien mat aussergewéinlecher Genauegkeet a Konsistenz ze verschaffen.
Egal ob et ëm optesch Lënsen, Deeler aus der Loftfaart, Präzisiounsbaukomponenten oder Hallefleederapplikatioune geet, dës Maschinn liwwert stabil, widderhuelbar an héichqualitativ Uewerflächenofschlëss - och bei Toleranzen op Nanometerniveau.


Ëmfangräich Werkstéckkompatibilitéit vun der Roboterpoléiermaschinn
De System ënnerstëtzt d'Veraarbechtung vun:
-
Flaach Uewerflächenfir Glas-, Keramik- a Metallplacken
-
Zylindresch a konesch Formenwéi zum Beispill Rollen, Wellen a Réier
-
Sphäresch an asphäresch Komponentenfir optesch Systemer
-
Fräiform- a axial Uewerflächenmat komplexe Kurven an Iwwergäng
Seng Villsäitegkeet mécht et gëeegent firsouwuel Masseproduktioun wéi och héichpräzis personaliséiert Fabrikatioun.
Kärfeatures & Virdeeler vun der roboterpoliermaschinn
1. Technologie mat duebele Polierkappen
-
Ausgestatt mateenzel RotatiounanSelbstrotatiounPolierkäpp fir Flexibilitéit.
-
Schnell Werkzeugwechsel ënnerstëtzt verschidde Veraarbechtungsmodi ouni laang Ausfallzäiten.
-
Ideal fir tëscht grober a feiner Polierstufen ze wiesselen.
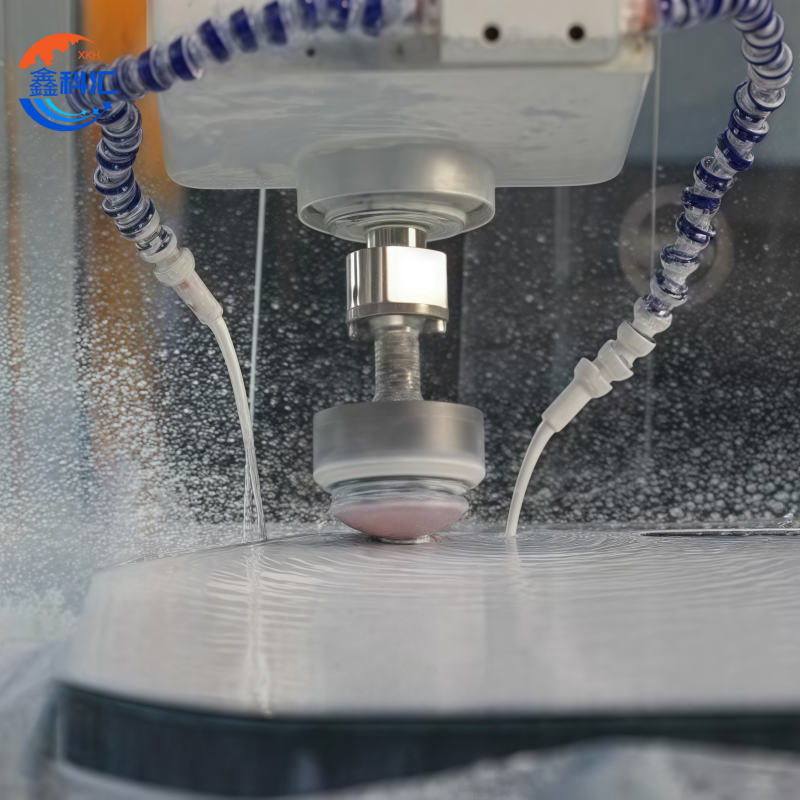
2. Präzisiounskraaftkontrollsystem
-
Echtzäit Iwwerwaachung vunDrock, Temperatur a Polierflëssegkeetsfloss.
-
Eng konsequent Kraaftawendung garantéiert eng gläichméisseg Uewerflächenfinish um ganze Werkstück.
-
Fäeg sech automatesch un Ongläichgewiichter vun der Uewerfläch unzepassen.
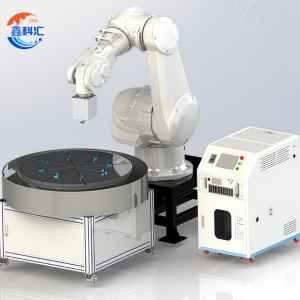
3. Sechs-Achs Robotersteierung
-
Voll Bewegungsfräiheet fir komplex Geometrien ze handhaben.
-
Glat, präzis Bewegungsweeër, déi iwwer fortgeschratt Algorithmen berechent ginn.
-
Héich Widderhuelungspositionéierungsgenauegkeet vun ±0,04 mm bis ±0,1 mm ofhängeg vum Modell.
4. Smart Automatiséierung & Miessung
-
Automatesch Kalibrierungsinstrumenter fir präzis Astellung an Ausriichtung.
-
Koordinatenmiessungssystem fir eng genee Positionéierung.
-
OptionalOnline Déckt Iwwerwaachungfir Echtzäitqualitéitskontroll.
5. Industriell Qualitéit
-
Duebel Servomotordesign erhéicht d'Poliereffizienz an d'Stabilitéit.
-
Déi steif mechanesch Struktur miniméiert Vibratiounen a garantéiert eng laangfristeg Haltbarkeet.

Technesch Spezifikatioune vun der roboterpoliermaschinn
| Ausrüstungsmodell | Roboterkierper | Widderhuelungspositionéierungsgenauegkeet | Veraarbechtungsduerchmiesserberäich | Eenzelrotatiounspoléierkopf | Multi-Rotatiouns-Polierkopf | Klengt Tool | Haaptradtyp Poléieren | Kugelkapppoléierung | Schnellwiessel Enn | Automatesch Kalibratiounsinstrument | Koordinatenmiesskapp | Online Déckt Iwwerwaachung | Numeresch Kontrollplattform |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| IRP500S | Stäubli TX2-90L | ±0,04 mm / vollstännegt Beräich | Φ50~Φ500mm | √ | × | √ | √ | √ | × | ○ | ○ | ○ | ○ |
| IRP600S | Stäubli TX2-140 | ±0,05 mm / vollstännegt Beräich | Φ50~Φ600mm | √ | × | √ | √ | √ | × | ○ | ○ | ○ | ○ |
| IRP800S | Stäubli TX2-160 | ±0,05 mm / vollstännegt Beräich | Φ80~Φ800mm | √ | √ | √ | √ | √ | ○ | ○ | ○ | ○ | ○ |
| IRP1000S | Stäubli TX200/L | ±0,06 mm / vollstännegt Beräich | Φ100~Φ1000mm | √ | ○ | √ | √ | √ | ○ | ○ | ○ | ○ | ○ |
| IRP1000A | ABB IRB6700-200/2.6 | ±0,1 mm / vollstännegt Beräich | Φ100~Φ1000mm | √ | ○ | √ | √ | √ | ○ | ○ | ○ | ○ | ○ |
| IRP2000A | ABB IRB6700-150/3.2 | ±0,1 mm / vollstännegt Beräich | Φ200~Φ2000mm | √ | ○ | √ | √ | √ | × | × | × | ○ | ○ |
| IRP2000AD | ABB IRB6700-150/3.2 | ±0,1 mm / vollstännegt Beräich | Φ200~Φ2000mm | √ | ○ | √ | √ | √ | × | × | × | ○ | ○ |
FAQ – Roboterpoléiermaschinn
1. Mat wéi enge Wierkstécker kann d'Roboter-Poliermaschinn ëmgoen?
Eis Roboter-Poliermaschinn ënnerstëtzt verschidde Formen an Uewerflächen, dorënner flaach, gekrëmmt, sphäresch, fräi Form a komplex Konturen. Si ass gëeegent fir optesch Komponenten, Präzisiounsformen, Metalloberflächen an aner héichpräzis Polierapplikatiounen.
2. Wat ass den Ënnerscheed tëscht Polierkäpp mat enger eenzeger Rotatioun a mat méi Rotatiounen?
-
EenzelrotatiounspoléierkopfD'Tool dréint sech ëm eng eenzeg Achs, ideal fir Standard-Uewerflächenveraarbechtung a Materialentfernung mat héijer Geschwindegkeet.
-
Multi-Rotatiouns-PolierkopfD'Tool kombinéiert Rotatioun mat Selbstrotatioun (Orbitatioun), wat e méi gläichméissegt Polieren op gekrëmmten an onregelméissegen Uewerflächen erméiglecht.
3. Wat ass den maximalen Duerchmiesser vun der Veraarbechtung?
Jee no Modell:
-
Kompakt Modeller (z.B. IRP500S) GrëffΦ50–Φ500mm.
-
Groussmodeller (z.B. IRP2000AD) handhaben bis zuΦ2000mm.
Iwwer eis
XKH spezialiséiert sech op High-Tech-Entwécklung, Produktioun a Verkaf vu speziellem optesche Glas a neie Kristallmaterialien. Eis Produkter si fir optesch Elektronik, Konsumentelektronik a fir d'Militär geduecht. Mir bidden optesch Komponenten fir Saphir, Lënsenofdeckungen fir Handyen, Keramik, LT, Siliziumcarbid SIC, Quarz a Hallefleederkristallwaferen. Mat qualifizéierter Expertise a moderner Ausrüstung exceléiere mir an der Veraarbechtung vu Produkter ouni Standard, mat dem Zil, e féierend High-Tech-Entreprise fir optoelektronesch Materialien ze sinn.

Verwandte Produkter
-

4H-semi HPSI 2inch SiC Substrat wafer Producti...
-
Benotzerdefinéiert véiereckeg Këscht Transportkëscht véiereckeg Fënster p ...
-

6 Zoll HPSI SiC Substratwafer Siliziumkarbid ...
-

Saphir Korund fir Edelsteen Al2O3 Kristallréier...
-

Aluminium Metall Eenkristall Substrat Polier ...
-

Au-beschichtete Wafer, Saphirwafer, Siliziumwafer...